Views
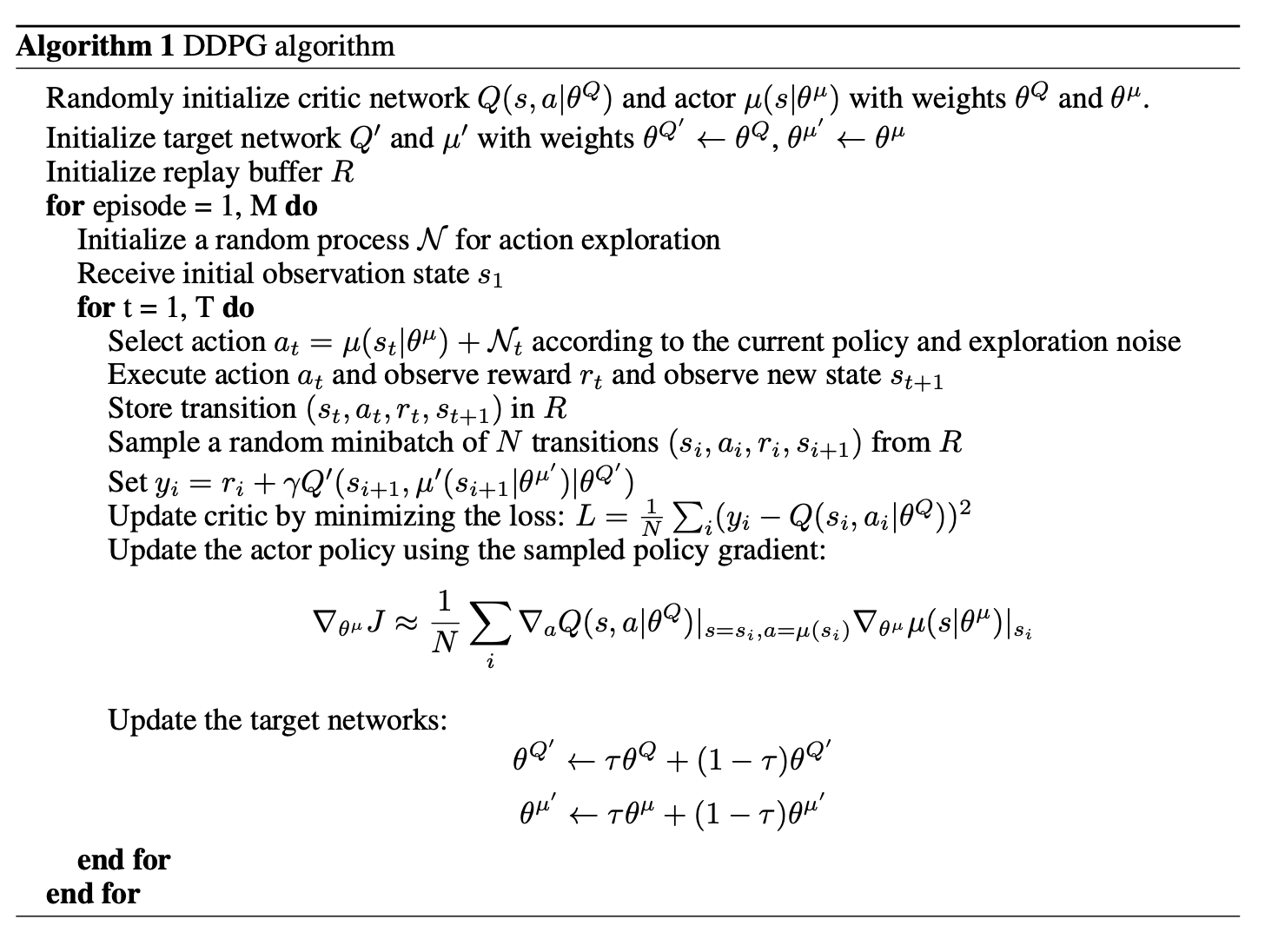
DDPG, short for Deep Deterministic Policy Gradient, is a model-free off-policy actor-critic algorithm, combining Deterministic Policy Gradient and DQN. Recall that DQN stabilizes learning of Q-function by experience replay buffer and the frozen target network. The original DQN works in discrete space, and DDPG extends it to continuous space with the actor-critic framework while learning a deterministic policy.
One trick is similar to the target network used in DQN, but modified for actor- critic and using “soft” target updates. And having both a target actor and critic is required to have stable targets in order to consistently train the critic without divergence.
And the other trick used here is that we construct an exploration policy by adding noise sampled from a noise process to our actor policy.
Methods