Bootstrap Ensembles
Description
基于高斯过程的环境模型能够衡量环境的不确定性, 在少量数据上也可以有很好的拟合效果。缺点是无法有效的对高维环境建模。
基于神经网络的环境模型能够对高维环境很好建模, 但缺点是容易在少量数据中产生过拟合,且一般的 NN 难以对不确定性进行评价。
使用多个概率环境模型的 Ensemble 来作为总体的环境模型。 其中的每个概率模型输出的方差可以用来衡量数据不确定性(aleatoric uncertainty), 多个模型之间的采样方差来衡量模型不确定性(epistemic uncertainty).
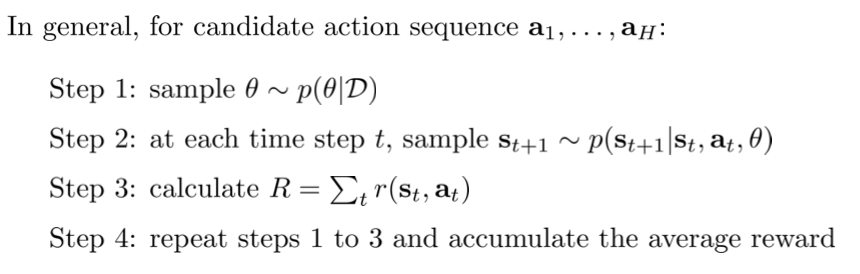
Bootstrap ensembles 训练多个模型,那么其结果的期望可以近似看作多个模型的均值。 模型在不同参数 $\theta$ 下的期望为:( $\theta$ 的概率由 $D$ 确定 ) $$ \int p(s_{t+1}|s_t,a_t,\theta)p(\theta|D)d\theta\sim\frac{1}{N}\sum_{i}p(s_{t+1}|s_t,a_t,\theta_i) $$ 现在,目标函数就变成了: $$ J\left(\mathbf{a}_{1}, \ldots, \mathbf{a}_{H}\right)=\frac{1}{N} \sum_{i=1}^{N} \sum_{t=1}^{H} r\left(\mathbf{s}_{t, i}, \mathbf{a}_{t}\right), \text { where } \mathbf{s}_{t+1, i}=f_{i}\left(\mathbf{s}_{t, i}, \mathbf{a}_{t}\right) $$ 整体算法流程为: