Iterative Linear Quadratic Regression
Description
# LQR 方法适用于状态转移方程为线性的,损失函数为二次的环境中,但实际中很多问题都不满足这个条件。 那么我们用一个线性方程来近似拟合现实问题的非线性环境动力学方程吗?
可以使用泰勒展开来近似。 $$ f\left(\mathbf{x}_{t}, \mathbf{u}_{t}\right) \approx f\left(\hat{\mathbf{x}}_{t}, \hat{\mathbf{u}}_{t}\right)+\nabla_{\mathbf{x}_{t}, \mathbf{u}_{t}} f\left(\hat{\mathbf{x}}_{t}, \hat{\mathbf{u}}_{t}\right)\left[\begin{array}{c} \mathbf{x}_{t}-\hat{\mathbf{x}}_{t} \\ \mathbf{u}_{t}-\hat{\mathbf{u}}_{t} \end{array}\right] $$ $$ c\left(\mathbf{x}_{t}, \mathbf{u}_{t}\right) \approx c\left(\hat{\mathbf{x}}_{t}, \hat{\mathbf{u}}_{t}\right)+\nabla_{\mathbf{x}_{t}}, \mathbf{u}_{t} c\left(\hat{\mathbf{x}}_{t}, \hat{\mathbf{u}}_{t}\right)\left[\begin{array}{c} \mathbf{x}_{t}-\hat{\mathbf{x}}_{t} \\ \mathbf{u}_{t}-\hat{\mathbf{u}}_{t} \end{array}\right]+\frac{1}{2}\left[\begin{array}{c} \mathbf{x}_{t}-\hat{\mathbf{x}}_{t} \\ \mathbf{u}_{t}-\hat{\mathbf{u}}_{t} \end{array}\right]^{T} \nabla_{\mathbf{x}_{t}, \mathbf{u}_{t}}^{2} c\left(\hat{\mathbf{x}}_{t}, \hat{\mathbf{u}}_{t}\right)\left[\begin{array}{c} \mathbf{x}_{t}-\hat{\mathbf{x}}_{t} \\ \mathbf{u}_{t}-\hat{\mathbf{u}}_{t} \end{array}\right] $$
移项之后,化简: $$ \bar{f}\left(\delta \mathbf{x}_{t}, \delta \mathbf{u}_{t}\right)=\mathbf{F}_{t}\left[\begin{array}{l} \delta \mathbf{x}_{t} \\ \delta \mathbf{u}_{t} \end{array}\right] $$ $$ \bar{c}≤ft(δ \mathbf{x}t, δ \mathbf{u}t\right)=\frac{1}{2}≤ft[\begin{array}{c} \delta \mathbf{x}_{t} \\ \delta \mathbf{u}_{t} \end{array}\right]^{T} \begin{array}{c} \mathbf{C}_{t}\left[\begin{array}{c} \delta \mathbf{x}_{t} \\ \delta \mathbf{u}_{t} \end{array}\right]+\left[\begin{array}{c} \delta \mathbf{x}_{t} \\ \delta \mathbf{u}_{t} \end{array}\right]T \begin{array}{c} \mathbf{C}_{t}\left[\begin{array}{c} \delta \mathbf{x}_{t} \\ \delta \mathbf{u}_{t} \end{array}\right]+\left[\begin{array}{c} \delta \mathbf{x}_{t} \\ \delta \mathbf{u}_{t} \end{array}\right]+≤ft[\begin{array}{c} \delta \mathbf{x}_{t} \\ \delta \mathbf{u}_{t} \end{array}\right]T \mathbf{c}t
\end{array} $$
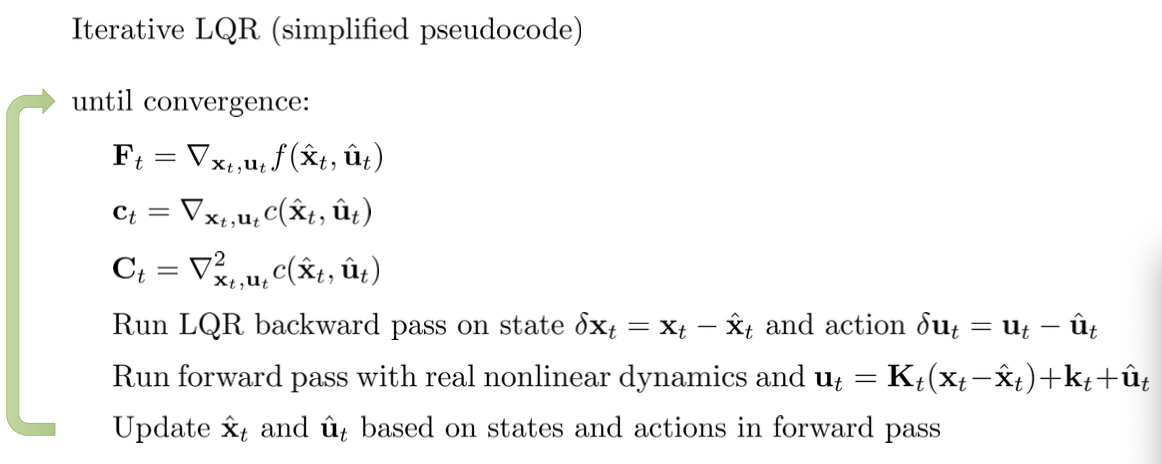
其中: $$ \mathbf{F}_t=\nabla_{\mathbf{x}_t,\mathbf{u}_t}f\left(\hat{\mathbf{x}_t},\hat{\mathbf{u}_t}\right) $$ $$ \mathbf{C}_t=\nabla^{2}_{\mathbf{x}_t,\mathbf{u}_t}c\left(\hat{\mathbf{x}_t},\hat{\mathbf{u}_t}\right) $$ $$ \mathbf{c}_t=\nabla_{\hat{\mathbf{x}_t},\hat{\mathbf{u}_t}}c\left(\hat{\mathbf{x}_t},\hat{\mathbf{u}_t}\right) $$ $$ \delta_{\mathbf{x}_t}=\mathbf{x}_t-\hat{\mathbf{x}_t} $$ $$ \delta_{\mathbf{u}_t}=\mathbf{u}_t-\hat{\mathbf{u}_t} $$
我们将其转换成了一个 LQR 问题。至此,我们可以得到 iLQR 算法: