Linear Quadratic Regression
Description
一般来说,强化学习很少有问题可以使用导数来求解,因为我们无法知道它的状态转移方程(环境动力学函数), 比如在玩 Atari 游戏的时候,下一状态我们是无法通过公式定义来得到的。 假设我们现在知道状态转移方程,那么要如何通过导数来求得最优解呢?
先来考虑一下确定性环境。我们的目标是: $$ \min _{\mathbf{u}_{1}, \ldots, \mathbf{u}_{T}} \sum_{t=1}^{T} c\left(\mathbf{x}_{t}, \mathbf{u}_{t}\right) \text { s.t. } \mathbf{x}_{t}=f\left(\mathbf{x}_{t-1}, \mathbf{u}_{t-1}\right) $$
这是一个约束问题,我们可以把它转换为非约束问题: $$ \min _{\mathbf{u}_{1}, \ldots, \mathbf{u}_{T}} c\left(\mathbf{x}_{1}, \mathbf{u}_{1}\right)+c\left(f\left(\mathbf{x}_{1}, \mathbf{u}_{1}\right), \mathbf{u}_{2}\right)+\cdots+c\left(f(f(\ldots) \ldots), \mathbf{u}_{T}\right) $$
对于非约束最优化问题,我们可以求导,使用梯度下降相关的方法来解决,需要计算 $$ \frac{d f}{d \mathbf{x}_{t}}, \frac{d f}{d \mathbf{u}_{t}}, \frac{d c}{d \mathbf{x}_{t}}, \frac{d c}{d \mathbf{u}_{t}} $$
求解上诉优化问题的两种方法又被称为 # Shooting Methods I 和 # Collocation Method 。
我们先使用 Shooting method 求解。
目标是:
$$
\min _{\mathbf{u}_{1}, \ldots, \mathbf{u}_{T}} c\left(\mathbf{x}_{1}, \mathbf{u}_{1}\right)+c\left(f\left(\mathbf{x}_{1}, \mathbf{u}_{1}\right), \mathbf{u}_{2}\right)+\cdots+c\left(f(f(\ldots) \ldots), \mathbf{u}_{T}\right)
$$
其中: $$ f\left(\mathbf{x}_{t}, \mathbf{u}_{t}\right)=\mathbf{F}_{t}\left[\begin{array}{c} \mathbf{x}_{t} \\ \mathbf{u}_{t} \end{array}\right]+\mathbf{f}_{t} $$ ,线性函数,$F$ 为环境动力学相关的函数; $$ c\left(\mathbf{x}_{t}, \mathbf{u}_{t}\right)=\frac{1}{2}\left[\begin{array}{c} \mathbf{x}_{t} \\ \mathbf{u}_{t} \end{array}\right]^{T} \mathbf{C}_{t}\left[\begin{array}{c} \mathbf{x}_{t} \\ \mathbf{u}_{t} \end{array}\right]+\left[\begin{array}{c} \mathbf{x}_{t} \\ \mathbf{u}_{t} \end{array}\right]^{T} \mathbf{c}_{t} $$ ,二次函数,$C$ 为任意维度匹配的矩阵。
目标方程只对动作 $u_t$ 求导,且上一时刻的状态和动作会影响下一时刻的状态 ($x_t=f(x_{t-1},u_{t-1})$),进而影响下一时刻的损失 c 。
因此,我们需要使用反向传播的方法,把梯度从最后一个状态开始,传回第一个状态。
因此先计算对 $u_T$ 的求导:
最后一步执行后的损失为:(因为损失与状态和动作相关,所以使用 Q 来表示)
$$
Q\left(\mathbf{x}_{T}, \mathbf{u}_{T}\right)=\text { const }+\frac{1}{2}\left[\begin{array}{c}
\mathbf{x}_{T} \\
\mathbf{u}_{T}
\end{array}\right]^{T} \mathbf{C}_{T}\left[\begin{array}{c}
\mathbf{x}_{T} \\
\mathbf{u}_{T}
\end{array}\right]+\left[\begin{array}{c}
\mathbf{x}_{T} \\
\mathbf{u}_{T}
\end{array}\right]^{T} \mathbf{c}_{T}
$$
设:
$$
\mathbf{C}_{T}=\left[\begin{array}{cc}
\mathbf{C}_{\mathbf{x}_{T}, \mathbf{x}_{T}} & \mathbf{C}_{\mathbf{x}_{T}, \mathbf{u}_{T}} \\
\mathbf{C}_{\mathbf{u}_{T}, \mathbf{x}_{T}} & \mathbf{C}_{\mathbf{u}_{T}, \mathbf{u}_{T}}
\end{array}\right]
$$
$$
\mathbf{c}_{T}=\left[\begin{array}{l}
\mathbf{c}_{\mathbf{x}_{T}} \\
\mathbf{c}_{\mathbf{u}_{T}}
\end{array}\right]
$$
对 $u_T$ 求导:
\begin{array}{c}
∇_{\mathbf{u}T} Q≤ft(\mathbf{x}T, \mathbf{u}T\right)=\mathbf{C}_{\mathbf{u}T, \mathbf{x}T} \mathbf{x}T+\mathbf{C}_{\mathbf{u}T, \mathbf{u}T} \mathbf{u}T+\mathbf{c}_{\mathbf{u}T}T=0
\mathbf{u}T=-\mathbf{C}_{\mathbf{u}T, \mathbf{u}T}-1≤ft(\mathbf{C}_{\mathbf{u}T, \mathbf{x}T} \mathbf{x}T+\mathbf{c}_{\mathbf{u}T}\right)
\end{array}
化简:
\begin{array}{l}
\mathbf{u}T=\mathbf{K}T \mathbf{x}T+\mathbf{k}T
\mathbf{K}T=-\mathbf{C}_{\mathbf{u}T, \mathbf{u}T}-1 \mathbf{C}_{\mathbf{u}T, \mathbf{x}T}
\mathbf{k}T=-\mathbf{C}_{\mathbf{u}T, \mathbf{u}T}-1 \mathbf{c}_{\mathbf{u}T}
\end{array}
可以看到,动作可以由状态来确定,因此损失可以只用状态来表示(V): $$ V\left(\mathbf{x}_{T}\right)=\operatorname{const}+\frac{1}{2}\left[\begin{array}{c} \mathbf{x}_{T} \\ \mathbf{K}_{T} \mathbf{x}_{T}+\mathbf{k}_{T} \end{array}\right]^{T} \mathbf{C}_{T}\left[\begin{array}{c} \mathbf{x}_{T} \\ \mathbf{K}_{T} \mathbf{x}_{T}+\mathbf{k}_{T} \end{array}\right]+\left[\begin{array}{c} \mathbf{x}_{T} \\ \mathbf{K}_{T} \mathbf{x}_{T}+\mathbf{k}_{T} \end{array}\right]^{T} \mathbf{c}_{T} $$
展开:
\begin{aligned} V\left(\mathbf{x}_{T}\right)=& \frac{1}{2} \mathbf{x}_{T}^{T} \mathbf{C}_{\mathbf{x}_{T}, \mathbf{x}_{T}} \mathbf{x}_{T}+\frac{1}{2} \mathbf{x}_{T}^{T} \mathbf{C}_{\mathbf{x}_{T}, \mathbf{u}_{T}} \mathbf{K}_{T} \mathbf{x}_{T}+\frac{1}{2} \mathbf{x}_{T}^{T} \mathbf{K}_{T}^{T} \mathbf{C}_{\mathbf{u}_{T}, \mathbf{x}_{T}} \mathbf{x}_{T}+\frac{1}{2} \mathbf{x}_{T}^{T} \mathbf{K}_{T}^{T} \mathbf{C}_{\mathbf{u}_{T}, \mathbf{u}_{T}} \mathbf{K}_{T} \mathbf{x}_{T}+\\ & \mathbf{x}_{T}^{T} \mathbf{K}_{T}^{T} \mathbf{C}_{\mathbf{u}_{T}, \mathbf{u}_{T}} \mathbf{k}_{T}+\frac{1}{2} \mathbf{x}_{T}^{T} \mathbf{C}_{\mathbf{x}_{T}, \mathbf{u}_{T}} \mathbf{k}_{T}+\mathbf{x}_{T}^{T} \mathbf{c}_{\mathbf{x}_{T}}+\mathbf{x}_{T}^{T} \mathbf{K}_{T}^{T} \mathbf{c}_{\mathbf{u}_{T}}+\mathrm{const} \end{aligned}
化简:
\begin{array}{l}
V≤ft(\mathbf{x}T\right)=\mathrm{const}+\frac{1}{2} \mathbf{x}TT \mathbf{V}T \mathbf{x}T+\mathbf{x}TT \mathbf{v}T
\mathbf{V}T=\mathbf{C}_{\mathbf{x}T, \mathbf{x}T}+\mathbf{C}_{\mathbf{x}T, \mathbf{u}T} \mathbf{K}T+\mathbf{K}TT \mathbf{C}_{\mathbf{u}T, \mathbf{x}T}+\mathbf{K}TT \mathbf{C}_{\mathbf{u}T, \mathbf{u}T} \mathbf{K}T
\mathbf{v}T=\mathbf{c}_{\mathbf{x}T}+\mathbf{C}_{\mathbf{x}T, \mathbf{u}T} \mathbf{k}T+\mathbf{K}TT \mathbf{C}_{\mathbf{u}T}+\mathbf{K}TT \mathbf{C}_{\mathbf{u}T, \mathbf{u}T} \mathbf{k}T
\end{array}
接下来就可以计算目标函数对 $u_{T-1}$ 的求导了。方法和之前相同,只不过这一步的损失要加上最后一步的损失, 因为这一步的状态和动作会影响下一步的损失。
当前步的损失(Q): $$ Q\left(\mathbf{x}_{T-1}, \mathbf{u}_{T-1}\right)=\operatorname{const}+\frac{1}{2}\left[\begin{array}{c} \mathbf{x}_{T-1} \\ \mathbf{u}_{T-1} \end{array}\right]^{T} \mathbf{C}_{T-1}\left[\begin{array}{c} \mathbf{x}_{T-1} \\ \mathbf{u}_{T-1} \end{array}\right]+\left[\begin{array}{c} \mathbf{x}_{T-1} \\ \mathbf{u}_{T-1} \end{array}\right]^{T} \mathbf{c}_{T-1}+V\left(f\left(\mathbf{x}_{T-1}, \mathbf{u}_{T-1}\right)\right) $$ V: $$ V\left(\mathbf{x}_{T}\right)=\operatorname{const}+\frac{1}{2}\left[\begin{array}{c} \mathbf{x}_{T-1} \\ \mathbf{u}_{T-1} \end{array}\right]^{T} \mathbf{F}_{T-1}^{T} \mathbf{V}_{T} \mathbf{F}_{T-1}\left[\begin{array}{c} \mathbf{x}_{T-1} \\ \mathbf{u}_{T-1} \end{array}\right]+\left[\begin{array}{c} \mathbf{x}_{T-1} \\ \mathbf{u}_{T-1} \end{array}\right]^{T} \mathbf{F}_{T-1}^{T} \mathbf{V}_{T} \mathbf{f}_{T-1}+\left[\begin{array}{c} \mathbf{x}_{T-1} \\ \mathbf{u}_{T-1} \end{array}\right]^{T} \mathbf{F}_{T-1}^{T}\mathbf{v}_{T} $$
合并上诉两项: $$ Q\left(\mathbf{x}_{T-1}, \mathbf{u}_{T-1}\right)=\text { const }+\frac{1}{2}\left[\begin{array}{c} \mathbf{x}_{T-1} \\ \mathbf{u}_{T-1} \end{array}\right]^{T} \mathbf{Q}_{T-1}\left[\begin{array}{c} \mathbf{x}_{T-1} \\ \mathbf{u}_{T-1} \end{array}\right]+\left[\begin{array}{c} \mathbf{x}_{T-1} \\ \mathbf{u}_{T-1} \end{array}\right]^{T} \mathbf{q}_{T-1} $$
其中:
\begin{array}{l}
\mathbf{Q}T-1=\mathbf{C}T-1+\mathbf{F}T-1T \mathbf{V}T \mathbf{F}T-1
\mathbf{q}T-1=\mathbf{c}T-1+\mathbf{F}T-1T \mathbf{V}T \mathbf{f}T-1+\mathbf{F}T-1T \mathbf{v}T
\end{array}
计算,令其导数为 0 , $$ \nabla_{\mathbf{u}_{T-1}} Q\left(\mathbf{x}_{T-1}, \mathbf{u}_{T-1}\right)=\mathbf{Q}_{\mathbf{u}_{T-1}, \mathbf{x}_{T-1}} \mathbf{x}_{T-1}+\mathbf{Q}_{\mathbf{u}_{T-1}, \mathbf{u}_{T-1}} \mathbf{u}_{T-1}+\mathbf{q}_{\mathbf{u}_{T-1}}^{T}=0 $$
得到: $$ \mathbf{u}_{T-1}=\mathbf{K}_{T-1} \mathbf{x}_{T-1}+\mathbf{k}_{T-1} $$
其中:
\begin{array}{l}
\mathbf{K}T-1=-\mathbf{Q}_{\mathbf{u}T-1, \mathbf{u}T-1}-1 \mathbf{Q}_{\mathbf{u}T-1, \mathbf{x}T-1}
\mathbf{k}T-1=-\mathbf{Q}_{\mathbf{u}T-1, \mathbf{u}T-1}-1 \mathbf{q}_{\mathbf{u}T-1}
\end{array}
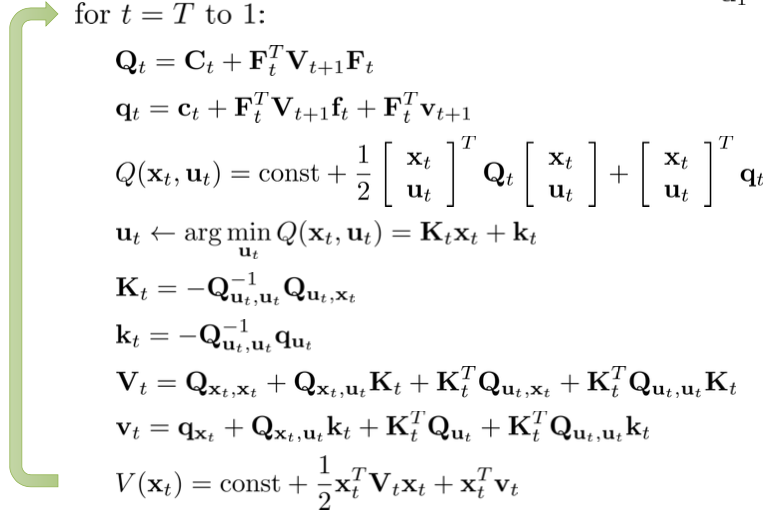
通过上面的分析,我们可以得到 LQR 算法中反向传播部分的算法:
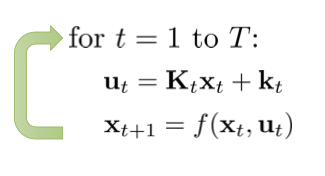
反向传播计算出 k 之后,正向传播就简单了: